Question 3 -Comparison of Q1 and Q2 solution
Contents
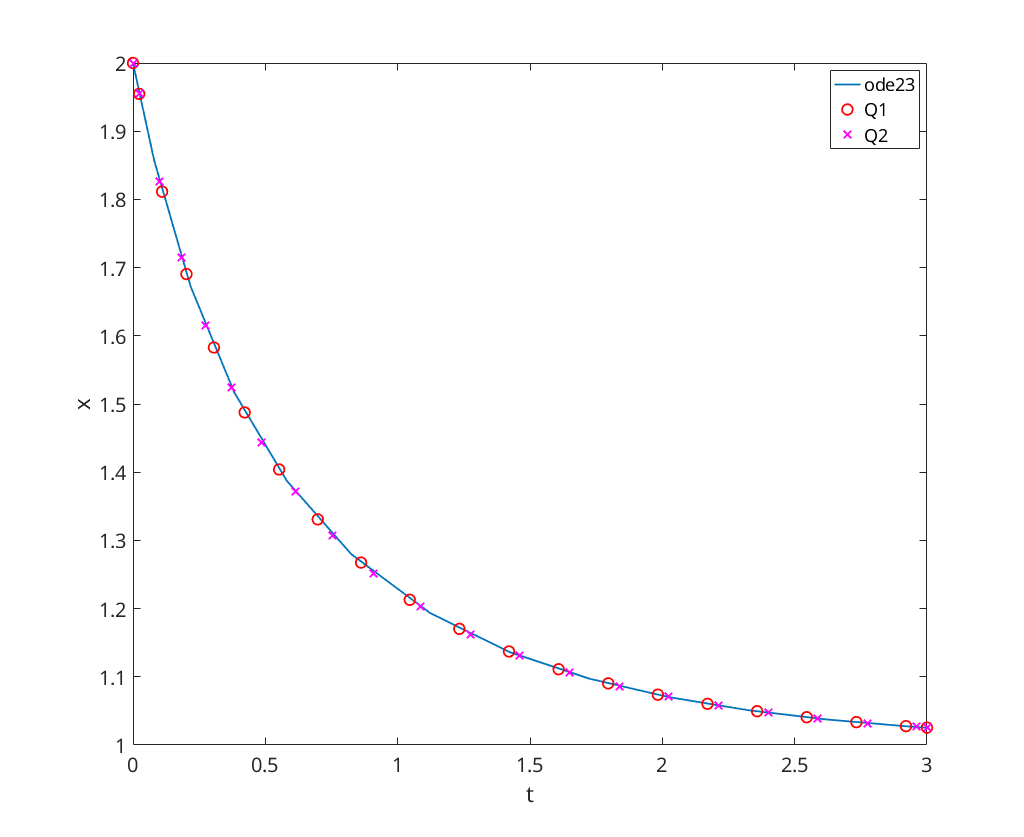
Logistic Equation
figure [t,x]=ode23(@logistic,[0,3], 2); plot(t,x(:,1), 'DisplayName', 'ode23'); xlabel('t'); ylabel('x'); hold on; disp('Logistic Equation:'); tic; [t,x]=q1_solution(@logistic,0,3, 2); duration = toc; plot(t,x(:,1),'ro','DisplayName','Q1'); fprintf(' Q1 Computation Time: %f\n', duration); tic; [t,x]=q2_solution(@logistic,0,3, 2); duration = toc; plot(t,x(:,1),'mx','DisplayName','Q2'); fprintf(' Q2 Computation Time: %f\n', duration); legend('Location', 'NorthEast');
Logistic Equation: Q1 Computation Time: 0.007764 Q2 Computation Time: 0.004892
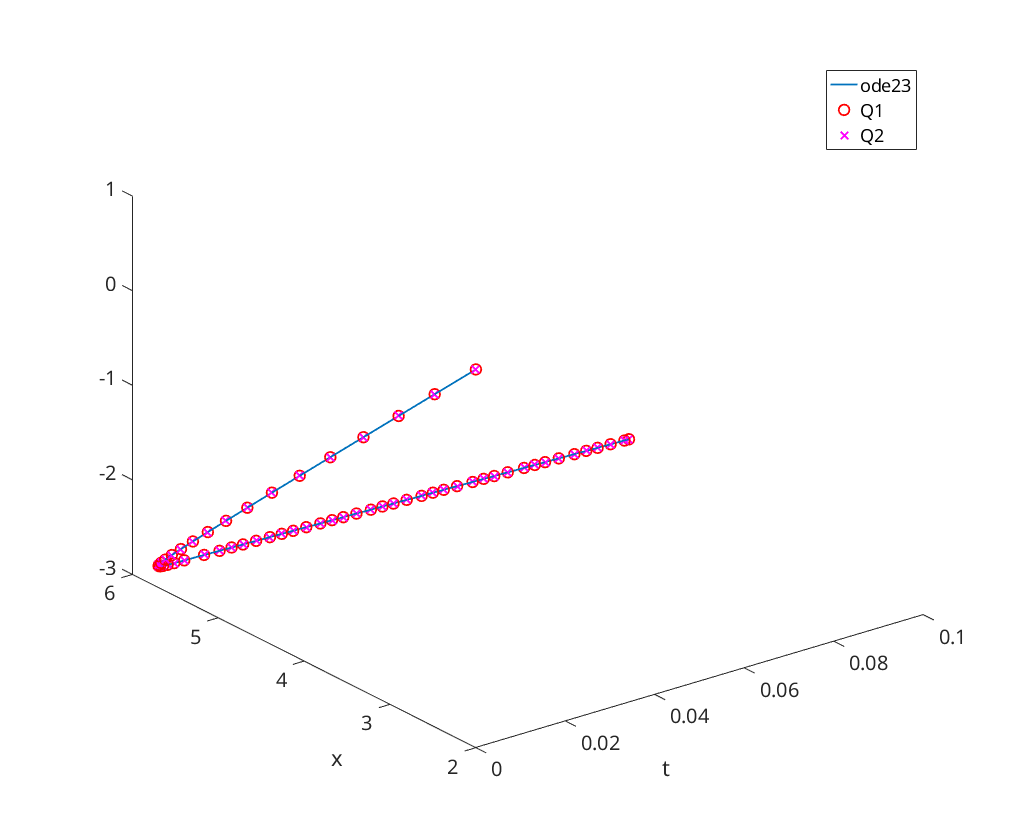
Stiff Linear System
figure [t,x]=ode23(@linsystem,[0,0.1], [2; 1]); plot3(t,x(:,1),x(:,2), 'DisplayName', 'ode23'); xlabel('t'); ylabel('x'); hold on; disp('Stiff Linear System:'); tic; [t,x]=q1_solution(@linsystem,0,0.1, [2; 1]); duration = toc; plot3(t,x(:,1),x(:,2),'ro','DisplayName','Q1'); fprintf(' Q1 Computation Time: %f\n', duration); tic; [t,x]=q2_solution(@linsystem,0,0.1, [2; 1]); duration = toc; plot3(t,x(:,1),x(:,2),'mx','DisplayName','Q2'); fprintf(' Q2 Computation Time: %f\n', duration); legend('Location', 'NorthEast');
Stiff Linear System: Q1 Computation Time: 0.006402 Q2 Computation Time: 0.004422
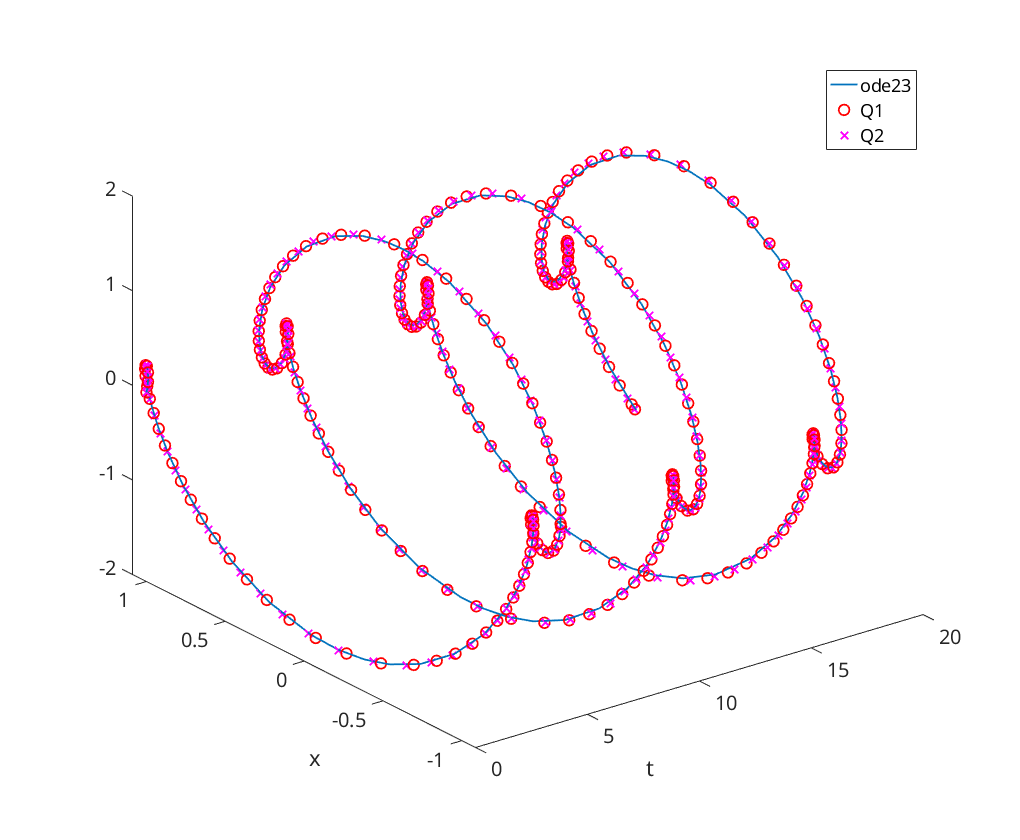
Oscillator
figure [t,x]=ode23(@oscillator,[0, 20], [1, 0]); plot3(t,x(:,1),x(:,2), 'DisplayName', 'ode23'); xlabel('t'); ylabel('x'); hold on; disp('Oscillator:'); tic; [t,x]=q1_solution(@oscillator,0,20, [1, 0]); duration = toc; plot3(t,x(:,1),x(:,2),'ro','DisplayName','Q1'); fprintf(' Q1 Computation Time: %f\n', duration); tic; [t,x]=q2_solution(@oscillator,0,20, [1, 0]); duration = toc; plot3(t,x(:,1),x(:,2),'mx','DisplayName','Q2'); fprintf(' Q2 Computation Time: %f\n', duration); legend('Location', 'NorthEast');
Oscillator: Q1 Computation Time: 0.005221 Q2 Computation Time: 0.004245
We note that for Q1 that for the low order method \[\begin{array}{rcl} \kappa_1 &=& f(t,x) \\ \kappa_2 &=& f(t+\tau,x+\tau\kappa_1) \end{array}\] and for the high order method \[\begin{array}{rclcl} \overline\kappa_1 &=& f(t,x) &=& \kappa_1 \\ \overline\kappa_2 &=& f(t+\frac13\tau,x+\frac\tau3\overline\kappa_1) \\ \overline\kappa_3 &=& f(t+\frac23\tau,x+\frac23\tau\overline\kappa_2) \end{array}\] Therefore, four evaluations of  are required.
are required.
For Q2, as it is an embedded method, we only have three evaluations of .
We expected that the Q1 method is slower than the Q2 method, which appears to be confirmed by the computation time.