Question 1
We consider the linearised version of the pendulum with dynamical friction:
where
with initial condition  at time
at time  .
.
A = [ 0 1; -1 -0.7 ];
We plot  for all
for all  and
and  against the domains of stability for the first, second, third and fourth order Runge-Kutta methods
against the domains of stability for the first, second, third and fourth order Runge-Kutta methods
figure; hold on; lambda=1; plot(lambda*eig(A), 'ro', 'MarkerSize', 14); lambda=0.4; plot(lambda*eig(A), 'bo', 'MarkerSize', 14); lambda=0.2; plot(lambda*eig(A), 'mo', 'MarkerSize', 14); lambda=0.1; plot(lambda*eig(A), 'go', 'MarkerSize', 14); rk_stab(1, 'r.'); rk_stab(2, 'b.'); rk_stab(3, 'm.'); rk_stab(4, 'g.'); xlim([-4 4]); ylim([-4 4]); axis('square'); xlabel('Re'); ylabel('Im'); legend('1\lambda','0.4\lambda','0.2\lambda','0.1\lambda', ... 'First Order RK', 'Second Order RK', 'Third Order RK', 'Fourth Order RK');
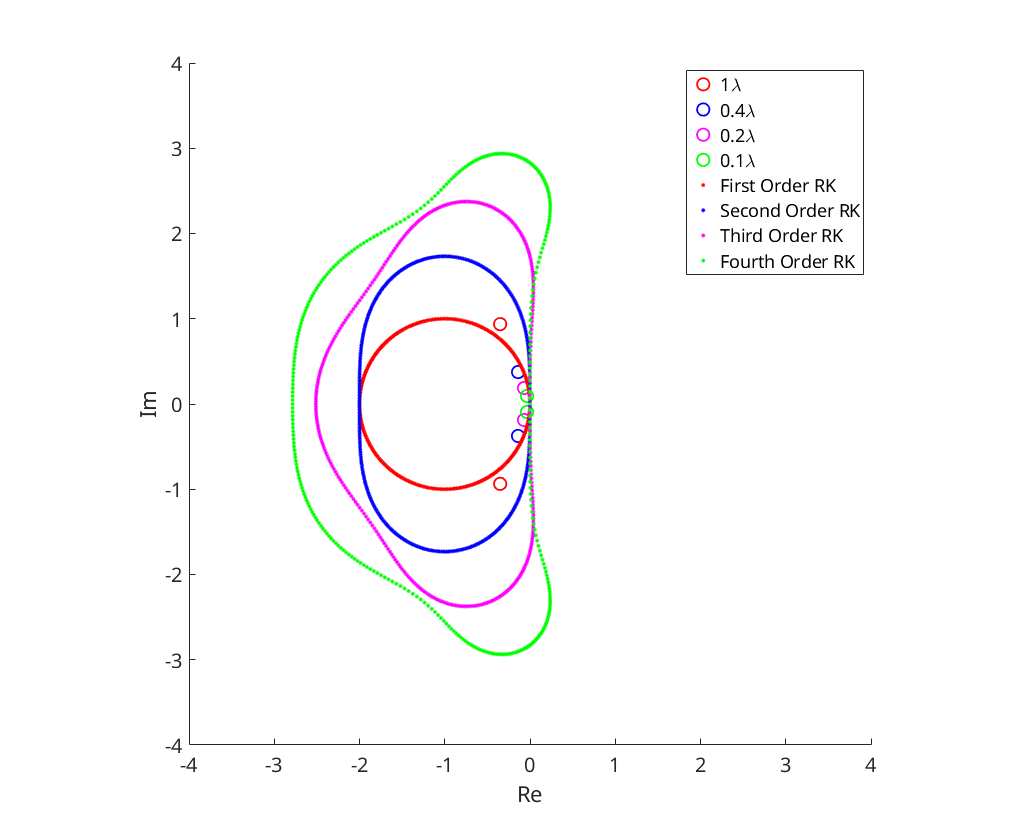
We notice that all four Runge-Kutta methods are stable for  as , for all , are inside the domains of stability for every method.
as , for all , are inside the domains of stability for every method.
For  we note that , for all , is outside the domain of stability for the first order Runge-Kutta indicating it is unstable for this value of
we note that , for all , is outside the domain of stability for the first order Runge-Kutta indicating it is unstable for this value of  .
.